
![]()
Las conclusiones anteriores se han utilizado como punto de partida para la definición de requisitos de diseño de alto nivel y la arquitectura para el sistema de Counter-UAS propuestos por Gradiant. A continuación se describen los sensores y efectores utilizados en este trabajo.
Requisitos de diseño
Según las conclusiones recogidas en los apartados anteriores, los requisitos deseados para un sistema de Counter-UAS eficaz y viable pueden resumirse como:
• Fusión de sensores
Ya que no hay ningún sensor infalible en todas las situaciones ni capaz de neutralizar cualquier tipo de drone, cualquier sistema viable necesita integrar varios sensores. En este escenario, para obtener el máximo rendimiento es necesario hacer una fusión a bajo nivel de los sensores disponibles.
• Solución modular
A pesar de la necesidad de una capa de fusión, los sensores individuales deben tener la capacidad de trabajar de forma independiente y el sistema debe proporcionar medios para añadir nuevos sensores. Gracias a esta modularidad, se pueden desarrollar nuevos sensores en el futuro y se simplifica la integración de subsistemas externos.
• Escalabilidad
La gran diversidad de casos de uso hace indispensable que el sistema pueda funcionar con un número arbitrario de sensores de cualquier tipo, para ello la capa de fusión necesita adaptarse de manera inteligente a los sensores presentes.
• Solución de software
Debido a la continua evolución de los drones y a la rápida aparición de nuevos modelos y tecnologías, los sensores necesitan realizar la mayor parte de sus funciones por software. Esto permite actualizaciones fáciles, rápidas y económicas para tener en cuenta los nuevos modelos de drone.
• Explorar marcas y modelos específicos (principio de Pareto o regla 80/20)
El mercado de los drones sigue claramente el principio de Pareto, lo que implica que la mayoría de los drones vendidos se corresponden a muy pocos modelos. Este hecho refuerza la importancia de las aproximaciones ad hoc para detectar, clasificar, rastrear y neutralizar drones.
• Neutralización
Aunque algunos sistemas Counter-UAV sólo incluyen las fases de detección, clasificación y seguimiento, para proporcionar una solución integral es necesario incluir un módulo de neutralización automática.
Arquitectura
Con todo lo anterior, la arquitectura propuesta se muestra en esta figura:
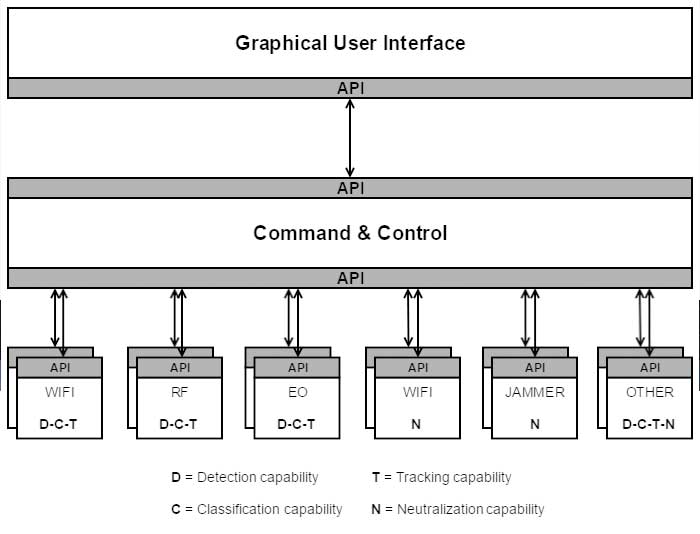
La figura ilustra cómo la arquitectura proporciona soporte para un número arbitrario de sensores y efectores, cada uno con el potencial de proporcionar diferentes capacidades al sistema. Para permitir esto, las APIs definen una capa de abstracción para el intercambio de datos entre módulos y sobre los protocolos de comunicación entre ellos.
En la figura, el módulo de mando y control es responsable de gestionar todas las comunicaciones del sistema y generar información de alto nivel a partir de información de bajo nivel (a través de un submódulo de fusión) proporcionada por los sensores y efectores. Además, este módulo también cuenta con una base de datos con los eventos anteriores y la gestión de evidencias.
Por último, es importante tener en cuenta la relevancia de la interfaz gráfica de usuario (GUI), que permite presentar los datos obtenidos por el sistema de una forma amigable para el operador del sistema.
Sensor espectral
La mayoría de los UAVs existentes emplean al menos una forma de comunicación por radiofrecuencia con su operador. Si el objetivo de esta conexión es enviar vídeo, recibir comandos, compartir datos telemétricos o una combinación de ellos, el enlace puede ser detectado por un sensor espectral. Además, estos enlaces suelen ser bidireccionales, lo que significa que la emisión de RF puede utilizarse para detectar y localizar tanto el controlador como el drone.
Sensor WIFI
Aunque el rango de tecnologías y bandas de frecuencias que podrían utilizarse para implementar estas comunicaciones es bastante amplio, el mercado y la economía de escala los llevan a un estrecho conjunto de opciones. En concreto, algunos de los actores más relevantes en el campo de los drones comerciales han elegido WIFI como el protocolo de comunicaciones.
Este hecho permite el uso de receptores WIFI, combinados con lógica de control específica para realizar la detección, clasificación y seguimiento de esos drones. Este sensor brinda buenas prestaciones contra drones que emplean WIFI, siendo además un sensor muy competitivo económicamente debido al hardware comercial que emplea.
Sensor espectral genérico
Para los drones que no emplean WIFI, y por lo tanto no pueden ser detectados por el sensor WIFI, el sistema cuenta con un sensor con un enfoque más general. En esta aproximación se emplean receptores configurables con un gran ancho de banda, capaces de explorar diferentes bandas de frecuencia y detectar señales de comunicaciones. Este tipo de sistemas, denominados SIGINT (Signal Intelligence), combinan el procesado de señal con técnicas de aprendizaje automático para detectar y clasificar señales de comunicaciones.
Teniendo en cuenta los requisitos de adaptabilidad y de que la solución software se ha optado por emplear plataformas SDR (Software Defined Radio) para la implementación de este sensor. Los dispositivos SDR son transceptores de RF en los que la mayoría de las tareas como la modulación, codificación o recuperación de frecuencia se realizan mediante rutinas implementadas en software. Para cada una de las bandas de frecuencia a analizar, la señal se procesa para detectar pulsos de RF y extraer características relevantes de los mismos como duración temporal, ancho de banda, energía, máscara espectral, etc. Posteriormente, empleando inteligencia artificial, estos pulsos se comparan con una base de datos de huellas espectrales, permitiendo la detección e identificación de drone.
Empleando varios sensores distribuidos y conectados entre sí, es posible determinar la posición del drone empleando técnicas de lateración.
Sensor de video
El sistema propuesto considera el uso de sensores basados en visión como resultado de la combinación de cámaras electro-ópticas con análisis de video inteligente. Esta combinación permite que los sensores basados en la visión proporcionen capacidades de detección automática de blancos.
El sensor basado en la visión propuesto adopta un enfoque multi-espectral, donde toda la información visual disponible, incluyendo RGB e IR, se combina y explora de forma coherente, para proporcionar las siguientes capacidades:
Alerta temprana mediante la detección automática en tiempo real de blancos pequeños (nivel de píxeles) con vídeo multi-espectral. Las técnicas de análisis de video inteligente empleadas permiten la detección en diferentes configuraciones de cámara, incluyendo configuraciones de azimut, elevación y zoom (PTZ).
Seguimiento automático en tiempo real de múltiples objetivos a partir de video multi-espectral. Las técnicas de análisis de vídeo inteligentes utilizadas permiten que este sensor combine automáticamente sus capacidades de detección y seguimiento para aprovechar al máximo el potencial de las configuraciones fijas, móviles y de las cámaras PTZ.
Identificación automática de objetivos en tiempo real. El sistema propuesto hará uso de técnicas avanzadas de Deep Learning para proporcionar una identificación multi-espectral de los objetivos.
Las capacidades descritas anteriormente permiten al sensor basado visión desempeñar un doble papel dependiendo de los escenarios. Por un lado, proporcionará información que será agregada a la información proporcionada por otros sensores para mejorar el rendimiento global del sistema. Por otro lado, en escenarios donde las condiciones operacionales son tales que un sensor diferente proporciona la mejor capacidad de detección posible, este sensor podrá aportar información en la etapa de clasificación/identificación así como en la ayuda visual y captación de evidencias.
Módulo de neutralización
Hacking WIFI
Utilizando componentes comerciales (COTS), este módulo busca vulnerabilidades en los enlaces de comunicaciones de los drones que usan el estándar WIFI como enlaces de datos. Dependiendo de las brechas de seguridad y de los protocolos de comunicaciones, este módulo puede lograr diferentes efectos: quitar el control al operador, provocar un fallo, apagar el drone o incluso enviar órdenes falsas al drone, por ejemplo ir a una posición segura y aterrizar.
Jamming inteligente
Las fases de detección, clasificación y seguimiento proporcionan información precisa sobre el sistema de comunicaciones del drone como la banda de frecuencias o la forma de onda empleando. Esta información se emplea para diseñar, generar y transmitir una señal interferente adecuada para bloquear al drone detectado. La señal se transmite empleando una plataforma SDR y un amplificador de potencia para aumentar la zona de influencia de jammer.
Resultados
Módulo basado en video
Los resultados obtenidos con imágenes reales visibles e infrarrojas confirman el potencial de los sensores basados en la visión y el análisis de video inteligente para proporcionar información valiosa para la detección, identificación y seguimiento de amenazas con UAS.
Respecto a la detección, el trabajo se centra en el desarrollo de un marco genérico para la detección de objetos en las bandas visibles, IR y su combinación (visible+IR), y que además puede aplicarse a las imágenes adquiridas a partir de cámaras en movimiento. La Figura 2 ilustra estos dos escenarios (superior izquierda para IR, superior derecha e inferior izquierda para visible), con objetivos a distancias que van desde 150 metros hasta 1500 metros y cámaras que se mueven en azimut a velocidades que van de 10 a 45 grados por segundo.
En cuanto al seguimiento, el trabajo se centra en el desarrollo de un marco genérico para el seguimiento de múltiples objetivos basados en la entrada multi-espectral de una cámara en movimiento. Los resultados sugieren que el seguimiento puede servir a un doble propósito: proporcionar información sobre la ubicación actual de los blancos y mejorar el rendimiento de la fase de detección ayudando a descartar los falsos positivos que no son consistentes en el tiempo. La figura ilustra un escenario con dos drones y una cámara en movimiento (superior derecha e inferior izquierda).
Por último, se está avanzando en la clasificación e identificación de drones. Este progreso se basa en la aplicación de técnicas avanzadas de aprendizaje máquina para discriminar entre drones y otros objetos (principalmente aves).

Detección, clasificación y seguimiento de drones basados en WIFI
Algunos drones (como los modelos de la familia Parrot) montan un punto de acceso WIFI en el drone cuando se encienden, a continuación cualquier dispositivo móvil (teléfono o tablet) puede conectarse a esa red WIFI y controlar el drone. Sin embargo, en otras marcas (como algunos modelos de DJI6) el punto de acceso se genera en el mando y el drone se conecta a él para enviar la información. El sistema propuesto puede detectar comunicaciones WIFI e identificarlas como las comunicaciones de un drone, independientemente de los dos escenarios planteados.

Para la fase de seguimiento, este dispositivo permite estimar la distancia al drone y al controlador empleando una medida de la potencia incidente. Además, utilizando varios sensores distribuidos es posible conocer la ubicación del drone y del controlador empleando técnicas de trilateración.
Este dispositivo está formado por una placa de procesado de reducido tamaño, peso, consumo y precio donde se realiza el procesado y una tarjeta de red WIFI (ambos se pueden ver en la figura). Las pruebas realizadas muestran que los drones de la familia Parrot se pueden detectar en menos de dos segundos a más de 600 metros. Este dispositivo proporciona el nombre el modelo del drone, la dirección MAC del drone y del controlador, la distancia al drone y al controlador.
Neutralización de drones basados en WIFI
Una vez que se ha detectado tanto el drone como el controlador, el sistema neutraliza al drone mediante un ataque de desautenticación. El efecto que produce este ataque depende del tipo de drone. Por ejemplo en los drones de la familia Parrot, esto provoca que el atacante no pueda controlar el drone ni seguir recibiendo el vídeo. Después de desvincular al controlador, el efector se conecta al drone, para enviar las órdenes de aterrizaje y apagado.
El software de neutralización también se ejecuta en la misma plataforma hardware que el módulo anterior.
Jammer inteligente

Como prueba de concepto, se ha desarrollado un jammer inteligente de baja potencia a través de una plataforma SDR. Los parámetros de entrada al jammer son la frecuencia y el ancho de banda de la señal interferente. Este desarrollo ha sido probado en varios drones comerciales con y sin GPS.
En el caso del drone con GPS, cuando el drone alcanza la zona de influencia del jammer, comienza a levitar sin la influencia del controlador (Figura 4). Desde el punto de vista del controlador, en la pantalla recibe un mensaje mostrando «Enlace de control no disponible» y la imagen se encuentra congelada.
Por el contrario, cuando se realiza esta misma prueba con un drone con GPS, lo que ocurre es que el drone entra en el modo a prueba de fallos «Fail-Safe Mode» o modo de emergencia dependiente su comportamiento de su configuración. Las opciones disponibles son: volver al punto donde despegó, aterrizar en ese mismo punto o quedarse levitando.
Conclusiones
Los ataques con drones han sido identificados como una amenaza potencial en diferentes escenarios, infraestructuras críticas, prisiones o entornos militares. En este documento se ha presentado una revisión de las tecnologías disponibles para enfrentarse a este problema que concluye con que ningún sensor o tecnología es capaz de detectar e identificación esta amenaza con suficiente fiabilidad, por lo que se necesita seguir investigando en nuevas tecnologías e hibridaciones. En este sentido, se ha propuesto un sistema de Counter-UAS basado en la fusión de dos sensores complementarios: análisis espectral y análisis inteligente de vídeo utilizando espectro visible e infrarrojo. Además, el sistema propuesto también tiene la capacidad de neutralizar la amenaza: utilizando un módulo de hacking para las comunicaciones basadas en WIFI o un módulo de jamming inteligente.
Estos son los artículos que completan la serie:
– Escenario actual contra drones
– Fases para combatir la amenaza dron
– Tecnologías para la detección, clasificación y seguimiento
– Estrategias anti dron de mitigación
– Propuesta Counter-UAS de Gradiant, desde el punto de vista de su arquitectura, tecnologías aplicadas y módulos específicos considerados.
Sé el primero en comentar