Para superar las limitaciones de rigidez y actuación de los materiales en los sistemas robóticos actuales, un proyecto de investigación conjunto del Laboratorio de Investigación del Ejército de EE.UU. y la Universidad de Minnesota se inspiró en los invertebrados.
El Ejército de los Estados Unidos utiliza robots que son estructuralmente rígidos, lo que los hace poco prácticos cuando se realizan operaciones militares en entornos urbanos altamente congestionados y disputados, donde las maniobras encubiertas son críticas para obtener superioridad militar.
«El éxito de las maniobras encubiertas requiere una alta flexibilidad estructural y control distributivo para colarse en espacios confinados o restringidos, operar durante períodos prolongados y emular las morfologías biológicas y la adaptabilidad», dijo el Dr. Ed Habtour, investigador de ARL que se especializa en dinámica estructural no lineal.
Según Habtour, los robots militares actuales tienen dos limitaciones principales que les impiden imitar la locomoción de organismos biológicos.
En primer lugar, carecen de la flexibilidad dinámica necesaria, ya que en su mayoría están ensamblados con componentes mecánicos y electrónicos rígidos.
En segundo lugar, los robots rígidos requieren mecanismos y circuitos eléctricos complejos para lograr una actuación activa y modos de movimiento complejos.
Para superar estas limitaciones, un proyecto de investigación conjunto de la ARL y la UMN se ha inspirado en los invertebrados.
Este esfuerzo de investigación condujo a la creación de prototipos de actuadores blandos, utilizando materiales activos con parámetros notablemente ajustables, como la flexibilidad estructural, la morfología y la actuación dinámica.
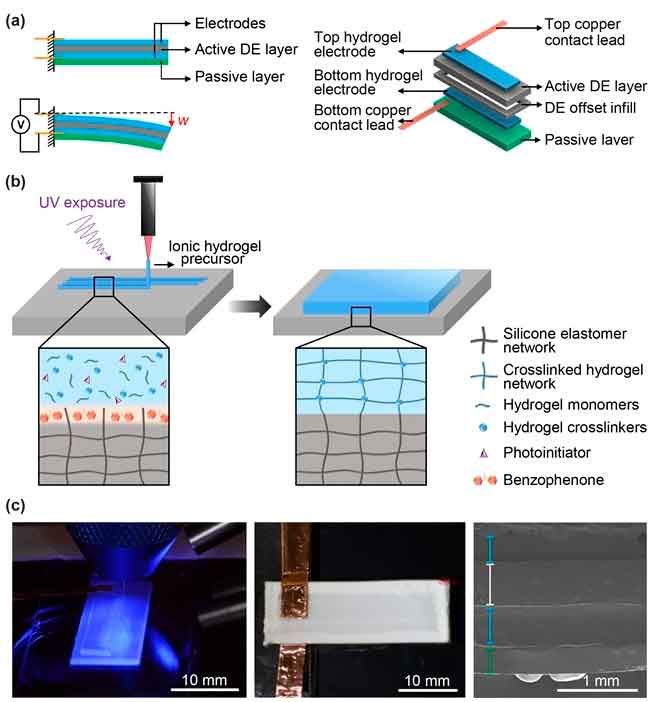
El prototipo es el primer actuador de elastómero dieléctrico impreso en 3-D, o DEA, que puede realizar altos movimientos de flexión.
Las DEAs impresas en 3-D mostraron desviaciones significativamente mayores, tres veces más que otros ejemplos recientes en la literatura científica.
Estos resultados se publicaron en Extreme Mechanics Letters (EML) en un artículo titulado: «3-D printed elically-driven soft actuators», 2018.
«En la fase inicial del proyecto, nuestro equipo comenzó a investigar nuevos métodos para emular la locomoción de invertebrados, lo que proporcionó una visión fundamental de las maquinarias de sus circuitos de actuación suaves y distribuidos que permiten altos movimientos de flexión sin soporte esquelético», dijo el profesor Michael McAlpine de UMN.
La comprensión de los mecanismos innatos de la actuación distributiva observada en la naturaleza ayudó al equipo a identificar los parámetros importantes, que pueden ser manipulados para lograr funciones novedosas, tales como lograr modos de movimiento altamente flexibles.
Según McAlpine, para obtener información científica sobre la importancia de estos parámetros, fue necesario primero construir y probar un prototipo similar a los actuadores que se encuentran en la naturaleza a través de una plataforma de impresión en 3-D construida a medida, y luego desarrollar un modelo matemático unificado para estudiar la sensibilidad de cada parámetro y predecir los diversos mecanismos de actuación óptimos.
Circuitos de actuación distribuidos impresos en 3D UMN con materiales blandos y elásticos con propiedades mecánicas similares a las de organismos biológicos como cefalópodos y gusanos.
ARL creó un modelo generalizado utilizando un enfoque de formulación energética, que fue clave para identificar dos mecanismos importantes para permitir un alto movimiento de flexión en actuadores biológicos blandos: (i) el ajuste de las propiedades físicas (mecánicas y geométricas) mediante la explotación de la interacción entre los materiales y las no linealidades dinámicas para aumentar el movimiento; y (ii) el resaltado del acoplamiento electromecánico entre el campo eléctrico y la rigidez estructural no lineal a través de los circuitos de actuación distributiva.
«Los resultados de la investigación representan un paso importante para proporcionar a Solider una plataforma autónoma de fabricación de formas libres -una impresora 3D de próxima generación, que puede imprimir materiales y dispositivos funcionales- para generar actuadores blandos y robots blandos potencialmente sin ataduras bajo demanda, sobre la marcha y en el punto de necesidad», dijo Habtour.
Habtour señaló que la investigación también sugiere que los actuadores blandos pueden ser los principales candidatos para la fabricación de aditivos autónomos en el campo de batalla.
«A diferencia de las actuales DEA impresas en 3D, el nuevo método de fabricación no requiere pasos de posprocesamiento, como el ensamblaje, el secado o el recocido», dijo el autor principal Ghazaleh Haghiashtiani. «Con el nuevo método de impresión 3D, el Solider puede aprovechar las propiedades de actuación únicas de los DEAs blandos a nivel de materiales fundamentales con resolución y complejidad de microescala, con un mínimo de experiencia previa».
En cuanto a los próximos pasos, Habtour dijo que la intención es desarrollar los principios experimentales y teóricos que gobiernan la interacción entre las interfaces internas y la cinética de las interacciones en sistemas de variantes temporales observadas en los organismos biológicos, que aseguran su locomoción flexible y su resistencia.
«Las intrigantes interacciones entre las propiedades micromecánicas de los materiales y varias no linealidades podrían proporcionar nuevas oportunidades científicas para emular las interacciones simbióticas en los sistemas biológicos», dijo Habtour. «Si podemos entender estas interacciones, entonces podemos usar esos conocimientos para fabricar estructuras dinámicas y robots flexibles que están diseñados para ser conscientes de sí mismos y capaces de ajustar sus morfologías y propiedades en tiempo real para adaptarse a una miríada de condiciones externas e internas».
Con esto, Habtour afirmó que las implicaciones serán descubrir las dinámicas emergentes de las estructuras vivientes y emularlas, fabricando estructuras y dispositivos funcionalmente complejos de forma autónoma, y explotando nuevos modos de actuación que no son alcanzables en los sistemas robóticos y mecánicos convencionales.
El Laboratorio de Investigación del Ejército de los Estados Unidos es parte del Comando de Investigación, Desarrollo e Ingeniería del Ejército de los Estados Unidos, que tiene la misión de asegurar que las operaciones terrestres unificadas sean decisivas para facultar al Ejército, al combatiente conjunto y a nuestra nación. RDECOM es un comando subordinado mayor del Comando de Material del Ejército de los Estados Unidos.
Fte. www.army.mil